
R7.01-1A11
R5.07-1A12
R2.01-1A11
R7.07-1A10

R4.07-1A11
R3.07-1A11
解答
R7.01-1A11
2 \(-A・E+(|A|^2-Δr^2)/(2r) 19\) 短く
ワンポイント解説(語呂合わせ)
GPSと2つの( )で行く(19) 距離は短い

(3) Bは1波長毎に不確定性が生じます。
1波長は、\(fλ=c\)より、
\(λ=\frac{c}{f}=\frac{300M}{1,575.42M}≒\frac{300}{1,600}=0.1875≒0.19[m]=19[cm]\)
R5.07-1A12
1 \(\sqrt{(x_0-x_1)^2+(y_0-y_1)^2+(z_0-z_1)^2}+t_d×c\) 4
ワンポイント解説
GPSの±は、-+-+-+4

R2.01-1A11
5 \(\sqrt{(x_0-x_1)^2+(y_0-y_1)^2+(z_0-z_1)^2}+t_d×c\) 4
R7.07-1A10
4 1.5 拡散コード PPP
ワンポイント解説
GPSは、苺(1.5GHz)を拡散(拡散コード)してパラッパラッパー(PPP)
R4.07-1A11
4 1.5GHz 拡散コード PPP
R3.07-1A11
5 少ない 小さい できない
ワンポイント解説
おいGPS!! お前等4つもありながら、少ない 小さい できない
ダメダメだな!
検索用キーワード(問題文の最初の一文)
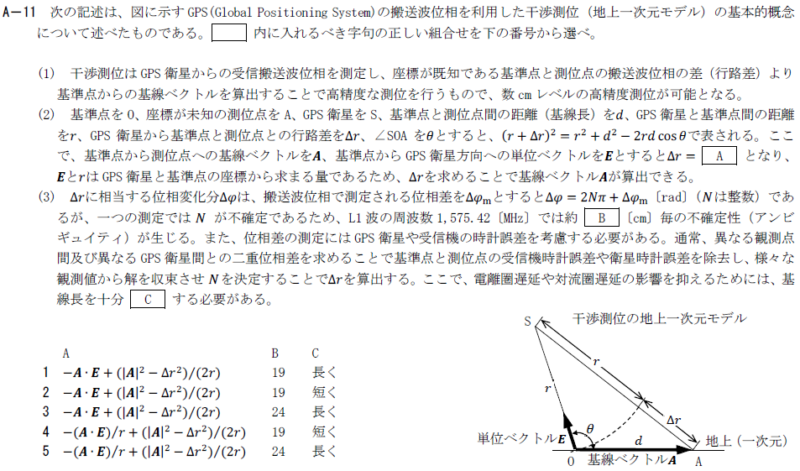
・図に示すGPS(Global Positioning System)の搬送波位相を利用した干渉測位(地上一次元モデル)の基本的概念
・GPS(Global Positioning System)を利用した移動局の位置の測位に伴う測位誤差や、既知の地点(基準点)でGPSの誤差を測定しこの誤差情報により離れた地点の誤差を推定し補正するディファレンシャルGPS(DGPS)等
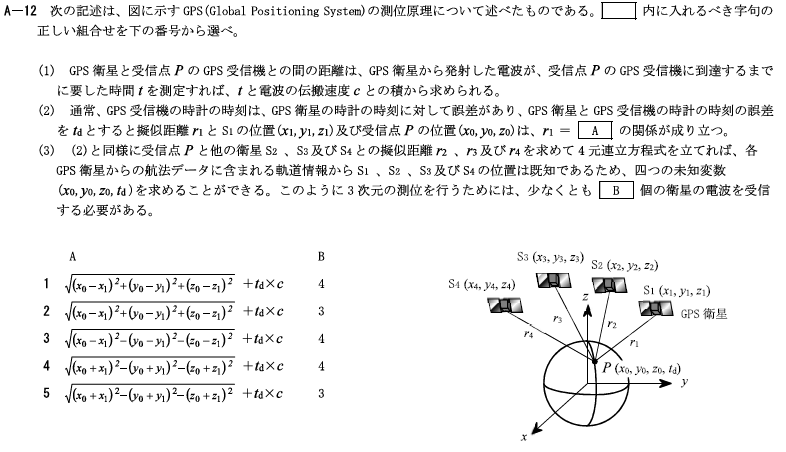
・図に示すGPS(Global Positioning System)の測位原理
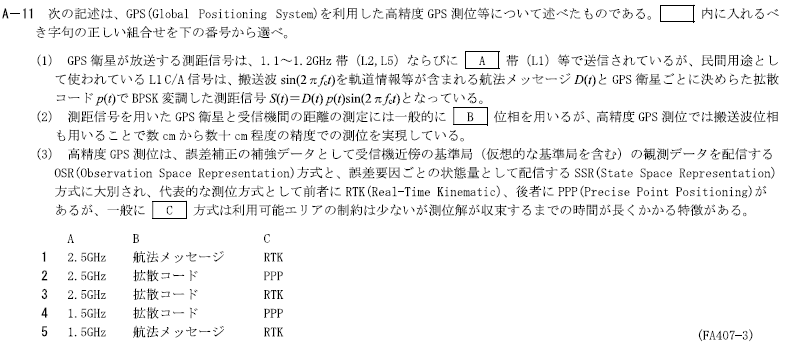
・GPS(Global Positioning System)を利用した高精度GPS測位等
・図に示すGPS(全世界測位システム)の測位原理

コメント